

4DPlants studies two different plant species with a range of architecture complexity. The model plant Arabidopsis thaliana is used as a reference since partner ENS Lyon masters its culture and corresponding virtual models. In particular, different sets of culture conditions and natural or mutant genetic contexts are used to maximize the variability of architecture and test the robustness of our tools. To further widen the genericity of our data, we also study the tomato plant (Solanum lycopersicum), a crop with a very contrasted architecture at different levels (leaf, stems, inflorescences, branching patterns).
Our goal is threefold:
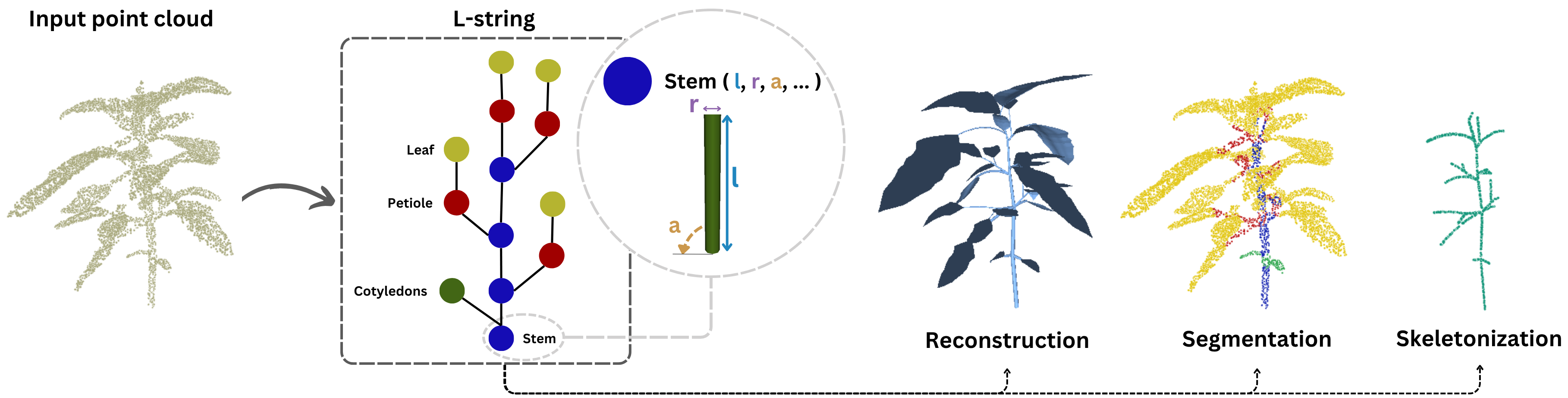
Our goal is to learn models of plant growth by first studying compact representations for spatio-temporal 3D plants, and subsequently learning 4D growth models. The models are learned and validated numerically using virtual plants. This allows for theoretically unlimited simulated training data with suitable annotations. Annotated datasets of real plants are also be used to fine-tune the models. Our goal is to achieve high-precision models by leveraging this data in supervised learning techniques. To start with, we favour precision over computing time or memory consumption, even though frugality can be an additional criterion later on. We explore how the balance between virtual and real plant data can affect these criteria. We also explore if some specific properties of the virtual plants are key for efficient training.
Our work can be decomposed in three successive steps:
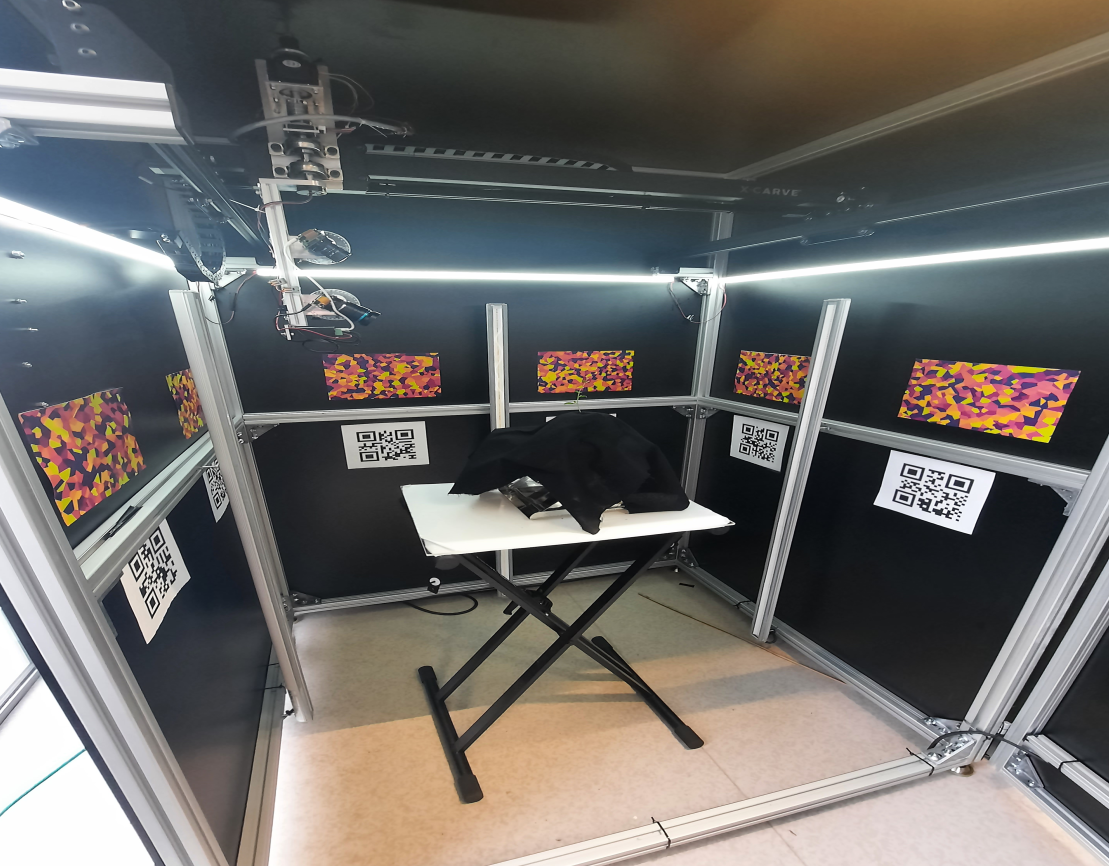
We integrate outputs from other tasks to first validate the results and test their utility for plant phenotyping, and then bridge the gap from research to applications by adapting the tools to the needs of the phenotyping platform's everyday users. In return, this work feeds up the two other tasks by facilitating more acquisitions and further analysis. Overall, it will provide useful guidelines to design and scale up a phenotyping experiment, both upstream to generate a training dataset, or downstream to perform plant trait measurements using our methods.
We work on three topics: